![]()
![]()
2019年4月11日
第11回 学生たちのその後の研究
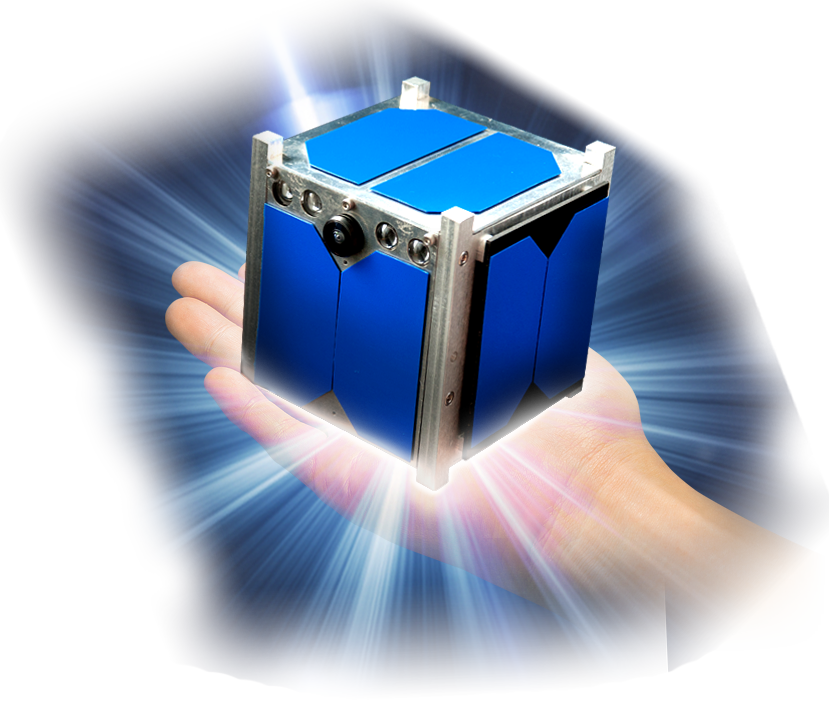
AUT Cube2のプロジェクトは、この連載の第3回で紹介した2017年度の研究を2018年度の4年生が引き継ぎ、2年越しで取り組んだものでした。2018年度の学生たちは10月の打ち上げの後、さっそく次の小型衛星の製作に向けてシステムや回路の改良に着手しています。より深みを増した、それぞれの研究内容を紹介します。
伊藤 雄介 さん
人工衛星に搭載する電池の充電システムの改良を行っています。AUT Cube2には充電池が4本搭載されており、1本の電池を100%にしてから次の電池の充電を開始し、4本の電池を順番に充電していきます。それを4本の電池を順番に少しずつ充電していくシステムに改良しています。充電池は100%まで充電しても、時間が経つと充電量が減少してしまう性質を持っています。そこで輪番のように少しずつ充電することで、4本の電池をほぼ同時に100%の充電状態にすることができます。これにより、より長くLEDを発光させたり、安定した状態で人工衛星のシステムを稼働させることが可能になると考えています。
岡田 達矢 さん
カメラ制御の改良をしています。AUT Cube2には2つの魚眼カメラが搭載されており、1つのカメラに1つの小型コンピュータ(ラズベリーパイ)が接続されています。つまり2台のコンピュータが搭載されているのですが、改良ではコンピュータを1台に減らすことを考えています。
また、撮影した画像を小分けにして送信した後、地上で統合を行うシステムについても研究をすすめています。これにより、人工衛星が必要とする電力や通信にかかる負荷などが軽減され、より効率的なシステムにできると期待しています。
吉田 充宏 さん
AUT Cube2には搭載できなかった、磁気トルクによる姿勢制御システムを開発しています。人工衛星の側面に80mm角ほどのコイルを配置し、このコイルに通電することで発生する磁界と地球の磁界の干渉により、人工衛星の姿勢を制御します。これにより、LEDを光らせて人工の星を観測する際にはLEDを搭載している面を地球に向けたり、720度撮影を行う際にはカメラが搭載されている通信アンテナを地球に向けるなどの制御を行います。現在はどれくらいコイルで発生する磁界があれば人工衛星の姿勢が制御できるかの実験を繰り返しているところです。このシステムが完成すれば、目標としているミッションの成功率を上げることができると思います。
浅井 悠平 さん
電源制御回路の開発を進めています。AUT Cube2では充電電池でLEDの発光や全方位カメラによる撮影を行い、電池が空になるとシステムを休止させて充電を行っています。改良では、人工衛星を稼働させながら電池の充電を行えるシステムにしたいと考えています。そのためには電池の充電状況に応じて、使っている電池と充電している電池を切り替えるための電源制御回路が必要になります。もっと制御のことを勉強して、新しいものを作り上げていきたいです。
SNSでシェアしよう!